

������Q����֮���ǿؼ��g���Ϻ�������˾
ϵ�ˣ�����������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺3064686604@qq.com
ϵ��ַ���Ϻ����ɽ��^�V����·4855Ū52̖3��
�]����201600
ϵ�ҕr��Ո�f������ӿ��־W�Ͽ����ģ��x�x��
���T��S7-300ģ�K6ES7314-6EH04-0AB0
OUT Y001��Y��ݔ���^������侀Ȧһ���ӫ@ݔ����̖�������@���J�飬��Ȧ�������������|�c����ͨ�ⲿؓ�d���ⲿؓ�d������|�������g�^����ȣ������ψD8��OUT T0 K40 �鶨�r���Ӿ�Ȧָ����е�K�鳣��40���O��ֵ�����늹����r�g�^���������������ʹ��OUTָ��Ԫ���У�ݔ���^���Y���o���^���M�����r��T��Ӌ����C����B�^���S�� ��2���|�c�Ĵ�ָ��AND���c��ANI���c�ǣ���ǰ�ߞ鳣�_�����ߞ鳣�]�����߾����چ��|�c�Ĵ�����ָ����؏ͳ��F���������ƣ������D��ʾ�� �ɵ�1�ݼ�������X000��T0��Y001���|�c�ɴ��Pϵ����T0�ij��]������X000�ĺ�ˣ���Y001�ij��]�t������T0���]�ĺ�ˡ����ڶ��dz��]����ANIָ��F������2�ݼ���X000��M0��Y001��ͬ�����|�cҲ�Ǵ��Pϵ��M0�ij��]���c������X001�ĺ�ˣ���Y000�ij��_���c�t������M0�ĺ�ˡ���M0��ָ����ANI����Y000��ָ��t��AND�����w����Ԕ�ψD����һ��ԒֻҪ�Ǵ������dz��_����AND���dz��]�Ąt��ANI����ʹ��AND��ANIָ��Ԫ���У�ݔ���^���X��ݔ���^���Y���o���^���M�����r��T��Ӌ����C����B�^���S�� ��3���|�c��ָ��OR����ORI�������|�c���r�������ݼ����Ўחl֧·��ֻҪ�dž��|�c�c��һ֧·�����dz��_����OR���dz��]�Ąt��ORI��
���Կ����ψD��X000��X001��M0����̎�ڲ��Pϵ������X000������l֧·������|�c����X001�dz��_�|�c������ORָ���M0�dz��]�|�c���t��ORIָ������c�������cM1�����������cY000������Y000Ҳ�dž��|�c�������Բ���ORָ���ʹ��OR��ORIָ��Ԫ���У�ݔ���^���X��ݔ���^���Y���o���^���M�����r��T��Ӌ����C����B�^���S�� ��4�����·�K�IJ�ָ��ORB������һ�ݼ����жࣨ���֧·��֧·�c��һ������ֻҪ�DZ�֧·���Ƕ������ϵ��|�c�ɴ��Pϵ�������^�ģ����·�K�����t��ʹ��ORBָ����D��ʾ�� ���ψD���Կ�����һ֧·X003�ij��_�|�c�cM1�ij��_�|�c�ɴ��Pϵ�����@�ӵ���r�£��γ��ˉK���Pϵ���������c��һ�е�X000�cM0�����ಢ���˕r����ľ������粽��̖0��1��2��3��4��ʾ��4�����F��һ��ORBָ�����c��һ�в������ڶ�֧·�����]Y001�cM2ͬ���Ǵ��Pϵ��Ҳ��һ���K�Y��
����ͨ�ù��I����Ӌ��C��30������ɾ��̿������ğo���У����F�˹��I�����I��Ӿ�߉���惦߉���w�S���书�������������F��߉���Ƶ����ֿ��Ƶ��M�����䑪���I���С�����F�ˆ��w�O�了�ο��Ƶ������\�ӿ��ơ��^�̿��ơ�����ɢ���Ƶȸ��N�΄յĿ�Խ������Ŀɾ��̿��������ڳɞ鹤�I�����I������������O�䣬��������ذl�]��Խ��Խ������á�
 ��ǰ̎���\�Р�B������늾W���ӕrͣ�C��늙C�ž߂�늙C�Ԇ��ӗl����
��ǰ̎���\�Р�B������늾W���ӕrͣ�C��늙C�ž߂�늙C�Ԇ��ӗl����
3���ʴ_���r�ز��@늾W늉���Ϣ��
4�������Ԇ��ӵ�늙C���չ�ˇ������Ҫ����PLC���A���O�ã�ͬ�r�������_늙C���Ԇ����Ќ�늾W��Ӱ푡�늙C�����Ԇ����в��÷����ӕr̎����
5�����ж�·ݔ��Ͷ�·ݔ�����ܣ����F���_늙C�Ԇ��Ӽ��п��ƣ�
6���߂��h��ͨ�Žӿڣ����F�c�C��DCS��ͨ�ţ��ڙC��DCS�з���،�ԓ�M�бO�غ͡�
���ʯ�ͻ������S��2��PLC늙C�����Ԇ����O�䣬�������T��S7-300ϵ��PLC������CPU313��̎���Ԫ��ÿ����1000�l���M��ָ��s��0.7ms��S7��300ͬ�r�߂�128�c������ݔ��/ݔ����32·ģ�M��ݔ��/ݔ����12KB��RAM��20KB��ؓ�d�惦������*��늙C��B��늉��Č��r�O�غͼ��r���F늙C�����Ԇ��ӵ�Ҫ��
CPU 315-2 PN/DP�����ھ�����/��Ҏģ�ij������Լ�ʹ��PROFIBUS DP��PROFINET IO�M�зֲ�ʽ�M�B�Ĺ��S����PROFInet�ό��F���ڽM�����Ԅӻ��Ќ��F�ֲ�ʽ���� 2017��Asiamold�Ǝ���3�³��cSIAF�Ԅӻ�չͬ���e�У�ȡ�����˝M��ijɹ�����չ��������18���͵^��795�҅�չ�̣�չ�[��e�_60,000ƽ���ף�һϵ��ǰ�خaƷ����Q����ӭ��64,077������40���͵^���I�ҡ����T��S7-300ģ�K6ES7314-6EH04-0AB0

����Ñ�����Ĉ��Еr�g����Ӳ���M�B�����O��CPU�Ē������ڱO�ؕr�g���tCPU�����T�����r��ͣ�C��ͬ�r�|�l���r�e�`OB80���\����Ϣ��D1��ʾ��

S7-300/400 CPU��ѭ�h����r�g�����T���r�g��Ĭ�J��150ms��zui����Ğ�6000ms�����Ñ�����Ĉ��Еr�g������O���Ē������ڱO�ؕr�g�����ȡ�zui����������O����D2��ʾ��

2. ��β鿴S7-300/400ϵ�y����ѭ�h�r�g��
������̎���Ҫ�˽����Ē������ڣ���ͨ�^���ɷN������ԃ��
����һ�����������d��PLC���M���ھ��B�ӣ��鿴CPU��Ϣ����D3��ʾ��

��������ͨ�^��OB1�������R�r׃�����͵�M�^�������xȡCPU����ѭ�h�r�g����D4���D5��ʾ��


3. ��β鿴S7-300/400��һ���ӳ���Ĵ�s���Еr�g��
ʹ��S7-300/400 CPU�r��������̎���Ҫ�˽�ij���ӳ���Ĵ�s���Еr�g������ԓ�ӳ���ǰ����քe�xȡCPUϵ�y�r犣�Ȼ��ʹ�Õr����pָ��FC34�M�о���Ӌ�㣬���E���£�
1���O��PLCϵ�y�r犣����D6��ʾ���O�ã�

2������һ���K��̖���顰time���Ĕ����K��DB1��������������׃������D7��ʾ��

3������Ҫ�yԇ���ӳ����***���W�j��zui��һ���W�j�xȡϵ�y�r犣�Ȼ���\�Õr����pָ��FC34�M��Ӌ�㡣
���������Мyԇ�ˡ�FC1���ӳ���Ĉ��Еr�g����D8��ʾ��

4��ͨ�^׃���O�ر��鿴ԓ�ӳ���Ĵ�s���Еr�g����D9��ʾ��

�D9�ӳ����s���Еr�g
1��ܜy����SENTRON PAC3200����
SENTRON PAC3200��ܱOҕ�O���***�ṩϵ�y���ԣ�����늉������zui��ֵ��zuiСֵ��ƽ��ֵ������ֵ���l�ʡ����������Q�ԡ�߉Ӌ�㡢ؓ�dڅ�ݡ��C���Ϳ��C��ʧ��ȡ�SENTRON PAC3200�əz�y 50 ����������ֵ������ 10�����Ӌ������������ȫ��ؓ�d�z�y�������Ĝy���ʴ_�ȝM�����Ӌ�����˜���Ҏ�����^��Ҫ��PAC3200����MODBUS RTU-RS485�ӿڡ�PROFIBUS-DP�ӿں�MODBUS TCP �ӿڣ����Ժܷ��㌢PAC3200�Ĕ����ς���PLC���M��̎����Ҳ�����ς���HMI���M�Д���������̎�����w�n���������T��ϵ�y�����p�ɵ،�PAC3200���ɵ���λ�Ԅӻ�ϵ�y�У����磬���ɵ����T�� SIMATIC PCS 7 powerrate ��SIMATIC WinCC powerrate ܛ�����С�
2 PAC3200ͨ�Žӿڌ���
PAC3200����ͨ�^MODBUS RTU RS485�ӿڡ�MODBUS TCP ��̫�W�ӿ��Լ��F������PROFIBUS-DP�ӿ��cPLC��HMIͨ�š�����քe���B��S7-300 PLC��������ͨ�����ܡ��B�ӵĂ��������̷����M�Ќ��ȣ�
1�� ͨ�����ܣ�PROFIBUS-DPʹ�����Ʒ�ʽ����վ�����L����վ���nj��r�F��������ͨ��푑��죬ͨ�ŵ�푑��r�g�����]PAC3200������ˢ�r�g������ˢ�r�g�����^PROFIBUS-DPˢ�r�g����������x����̫�WMODBUS TCP ͨ�ţ����ڲ��nj��r�W�j��ͨ�����ܴ�֮��ͨ�ŵ�푑��r�gҲ�����]PAC3200������ˢ�r�g������ˢ�r�g�����^��̫�Wˢ�r�g������ʹ��RS485 MODBUS RTUͨ�ţ����ڻ��ڴ��ڣ�ͨ�����ܲ����c��̫�W�cPROFIBUS-DP����^��
2�� �B�ӂ�����ʹ��PROFIBUS-DP��������վ�����ܣ�zui������B��126��վ�c����̫�WMODBUS TCP ͨ�ţ�����CP���B�ӂ�����ͨ��16����ʹ��RS485 MODBUS RTU�������B��һ���W�Σ�����ֵ31��վ�c��
3�� ���̣�ʹ��PROFIBUS-DP������Ҫ����ͨ�ų���ʹ����̫�WMODBUS TCP ͨ�ţ���Ҫ�����l�ͽ���ͨ�ų���ʹ��RS485 MODBUS RTUͨ�ţ���Ҫ������վ݆ԃ�����^�韩������]��ُ�IMODBUS RTU���ӣ�߀��Ҫ����ͨ�ų���
4�� �r��PROFIBUS-DP�cRS485 MODBUS RTUͨ����Ҫُ�I�x���W������PAC3200����������̫�W�ӿڣ�֧��MODBUS TCP ͨ�š�
���挢��BPAC3200��MODBUS TCP ͨ�š�
3 MODBUS TCP ͨ�ň���
MODBUS TCP ʹMODBUS RTU�f�h�\������̫�W��MODBUS TCPʹ��TCP/IP����̫�W��վ�c�g����MODBUS���ģ�MODBUS TCP�Y������̫�W�����W�j�;W�j�˜�TCP/IP�Լ���MODBUS���鑪�Åf�h�˜ʵĔ�����ʾ������MODBUS TCPͨ�ň��ı����b����̫�WTCP/IP�������С��c���y�Ĵ��ڷ�ʽ��MODBUS TCP����һ���˜ʵ�MODBUS���ĵ�TCP�����У����َ��Д���У�͵�ַ����D1��ʾ��
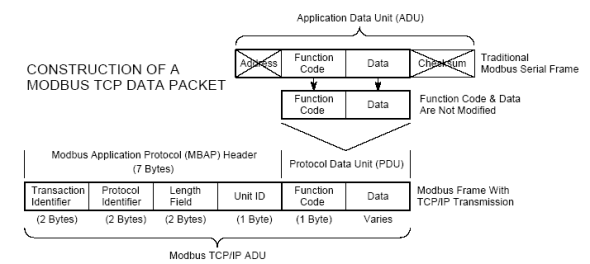
�D1��MODBUS TCP����
����ʹ����̫�WTCP/IP�����·�ӵ�У�C�ƶ����C�˔����������ԣ�MODBUS TCP �����в��َ��Д���УCHECKSUM����ԭ�Ј����еġ�ADDRESS��Ҳ����UNIT ID�����������MODBUS���Åf�h�����^�С�
MODBUS TCP������ʹ��502�˿��c�͑����M��ͨ�š�
S7-300 �cPAC3200 ֮�g�M��MODBUS TCP ͨ�ŕr��MODBUS����f�h�Ĉ����^�xֵ���£�
byte 0�� transaction identifier (���ֹ�) �C ��0
byte 1��transaction identifier(���ֹ�) - ��0
byte 2��protocol identifier(���ֹ�) = 0
byte 3��protocol identifier (���ֹ�) = 0
byte 4��length field (���ֹ�) = 0 (������еĈ���С��256)
byte 5��length field (���ֹ�) = ������S���ֹ���
byte 6��unit identifier -ԭ��վ��ַ���@���0
byte 7��MODBUS ���ܴa��ͨ�^���ܴa�l��ͨ������
byte 8 �������m���ֹ����c���ܴa���P
4 PAC3200֧�ֵ�MODBUS TCP ���ܴa
��MODBUS TCP �Ĉ����У�ͨ�^ʹ�ù��ܴaՈ��ͨ�Ż��Ĕ������猦�Ȳ��Ĵ������x���������xݔ��Ĵ�������ݔ���Ĵ����ȡ���ͬ�IJ���ʹ�ò�ͬ�Ĺ��ܴa����FC1��2��3��4��5��6��7��15��16�ȣ�PAC3200֧��FC2��FC3��FC4��FC6��FC16

